一次審査を通過した6つの作品のまとめ
2019.12.13
「ソニックガーデン presents Go Global! DojoCon Japan 2019 プログラミングコンテスト」で一次審査を通過した6つの作品をご紹介します。
パパふとらないでねー

作者
川口 聡介 (CoderDojo名古屋)
作品の概要
ぼくのパパは太っています。だから、パパのやせるステップアップのために作りました。マイクロビットを冷蔵庫に貼っておくと、センサーが反応して、スクラッチの画面が変わります。朝、昼、晩によってパパへのメッセージが変わります。(それぞれ3種類作りました。)このメッセージを見たら、パパは、やせられると思います。ミニゲームも作ったので楽しむこともできます。 大変だったところは、冷蔵庫を開けたときも閉めたときも、センサーが反応してしまって。動画が途中できれてしまったので、動画が最後まで流れるように、変数を使ったところです。
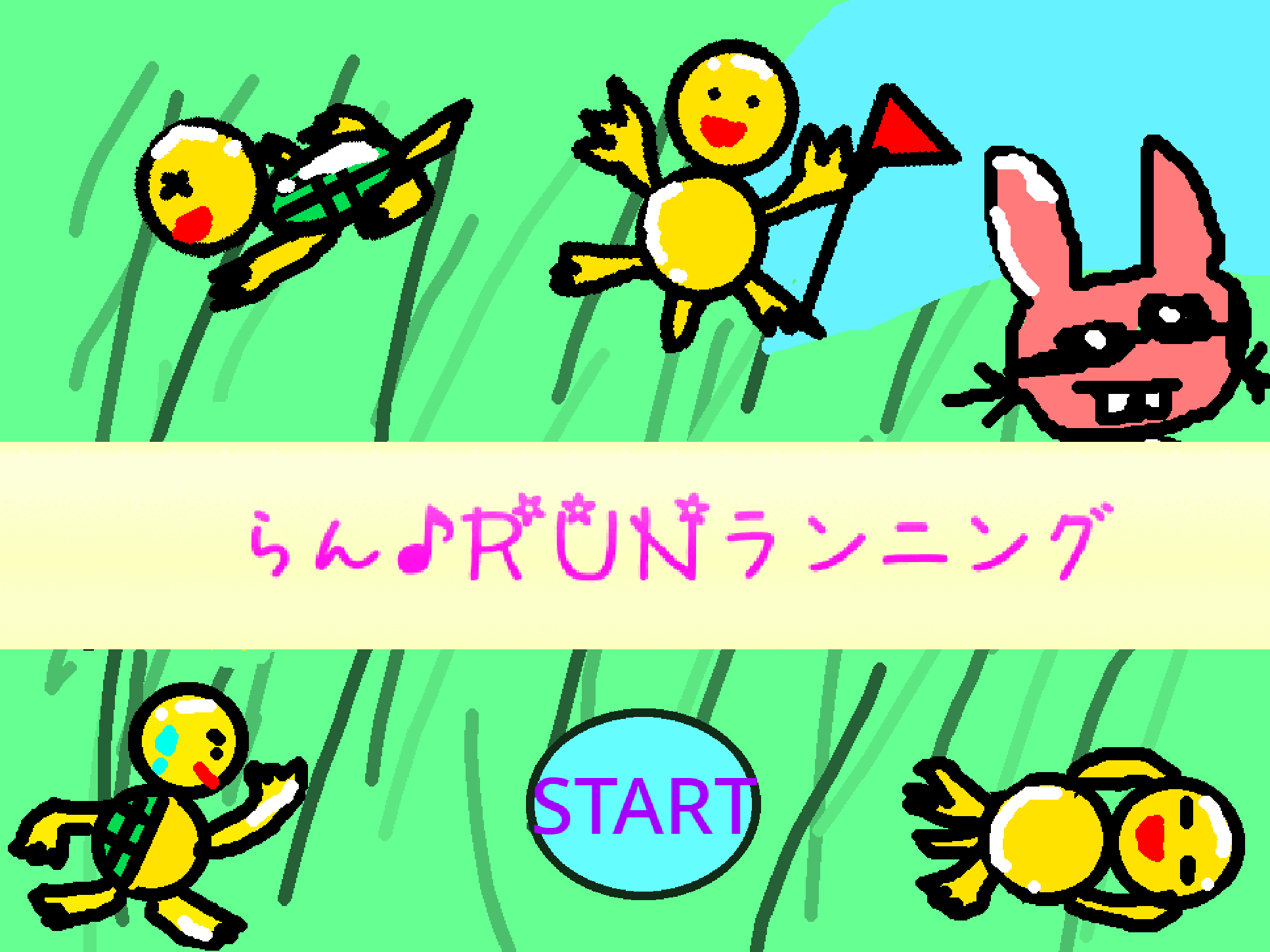
らん♪RUNランニング
作者
川口 明莉 (CoderDojo名古屋)
作品の概要
私は、今年の運動会でリレー選手になれなくて、とてもがっかりして泣いてしまいました。来年は絶対にリ レー選手になりたくて、公園で走る練習をしています。でも、雨降りの日はでき ません。足が速くなるには、毎日の練習が大事です。なので、家で毎日楽しく練習してステップアップできる、らん♪RUNランニングを作りました。色々な昔話をテーマに、マイクロビットを使って楽しくトレーニングができる作品です。 トレーニングの結果は記録されていて、グラフで見る事ができるので、毎日続けようという 気になります。日々の結果を覚えておけるようにクラウド変数とリストを使うところが、とても苦労しました。毎日のがんばり具合によって変わる、がんばりアニメも面白いのでアピールポイントです。3つのトレーニングで流れる音楽もこだわっていて、私がピアノで演奏したものを取り込んでいます。
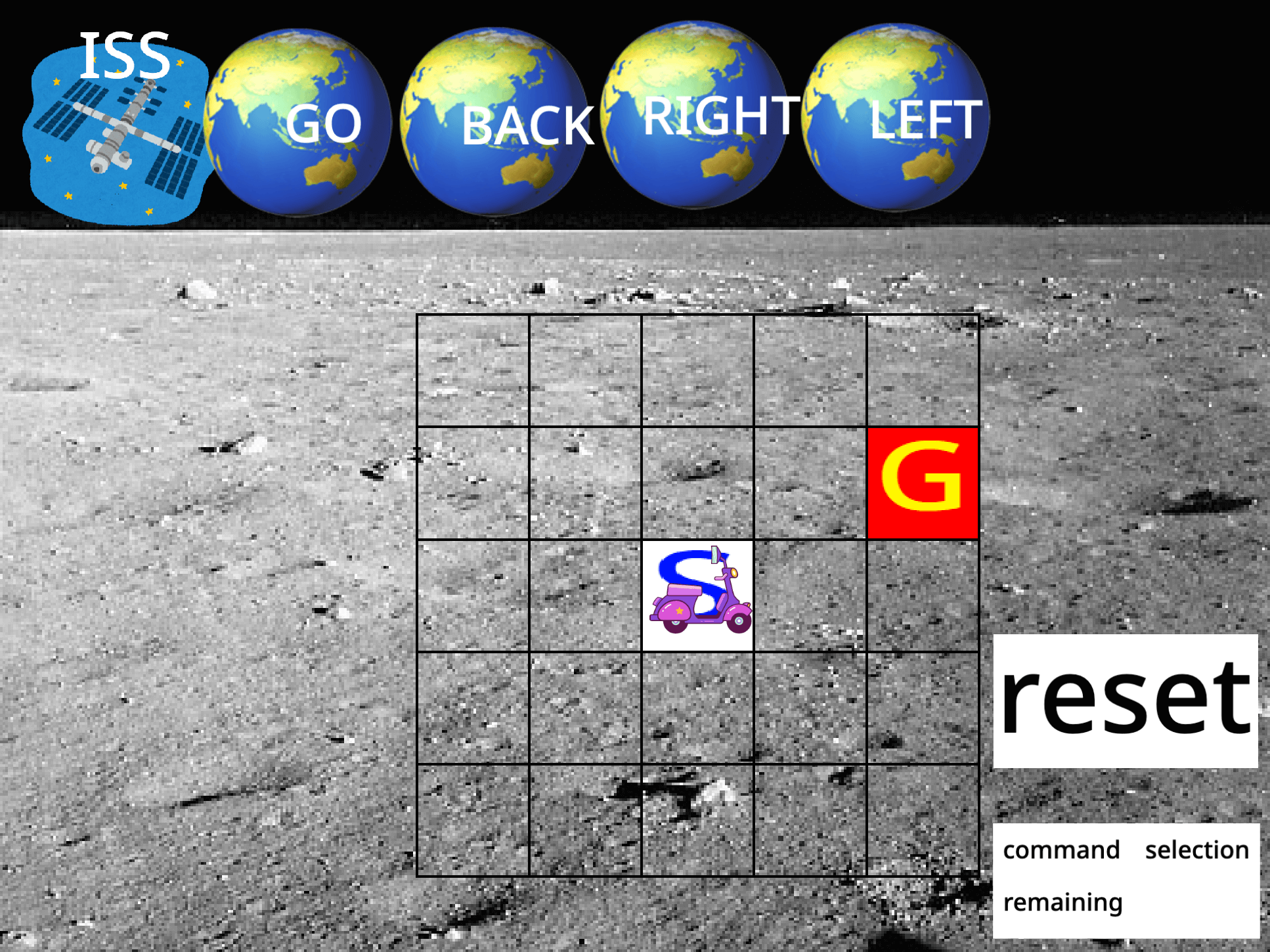
未来の月面調査ロボット
作者
古山 芽吹 (CoderDojo岐阜)
作品の概要
宇宙兄弟の世界を再現しました。地球からISSにいるロボット(パソコン操作ロボ LEGO WeDo2.0)に信号を送り、ISSから月面いるロボット(ラジコン操作ロボット LEGO BOOST)に信号を送り、ロボットがラジコンを動かします。 アピールポイント:世界中の人に見てもらうためにスクラッチの翻訳機能を使い、すべて英語にしました。ロボット3体はオリジナルで自分で考えました。定義ブロックを使い、分かりやすくて見やすいプログラムにしました。
苦労した個所:ラジコン操作ロボット(LEGO BOOST)のモーターとラジコンのコントローラーを組み合わせるのに苦労しました。またラジコンのコントローラーをモーターで動かす時のパワー調整が大変でした。パソコン操作ロボ(LEGO WeDo2.0)はモーターが1つしかなくて、前・後・右・左の4つの信号をどのように入力するか考えました。プログラムの変数で調節することでうまくいきました。 「つぎのSTEP」がテーマなので、未来のロボを再現しました。ラジコンを操作するロボットは今でもあると思います。未来はロボットを操作するロボットが現れると思います。「つぎのSTEP」として未来のプログラミングはゲームだけで終わらず、ロボットが自分でプログラミングして他のロボットを動かす世界になると思い作りました。
LOST

作者
山﨑 帝虎 (CoderDojo赤羽)
作品の概要
今回のテーマは「次のSTEP」です。ゲーム内でどのようにこのテーマを盛り込もうか考えた時に思いついたのがゲーム内で成長していくというものです。プログラムを手に入れて成長していく所に注目してみてください。
新感覚パズルゲーム コンビ!

作者
飯干 功惺 (CoderDojo西宮・梅田)
作品の概要
僕は去年の夏にCoderDojoのイベントで「チームを組んで一つの作品を作る」というイベントに参加したことがあり【次のSTEP】と聞いてそのイベントを思い出し【次のSTEP】といえば皆の協力だと思ったので協力ゲームにしつつ、【次のSTEP】のSTEPから、【一歩進めば何かが起こる】というギミックをつけたゲームにしました。
この作品のアピールポイントはギミックの通り【一歩進めば何かが起こる】ところです。一人だと簡単にクリアできますが、二人でプレイするゲームにしたおかげで、難しすぎず簡単すぎない丁度いい難易度になりました。
このゲームを作る時に苦労した所は踏んだタイルの色によってタイルに穴が開く部分の作成です。
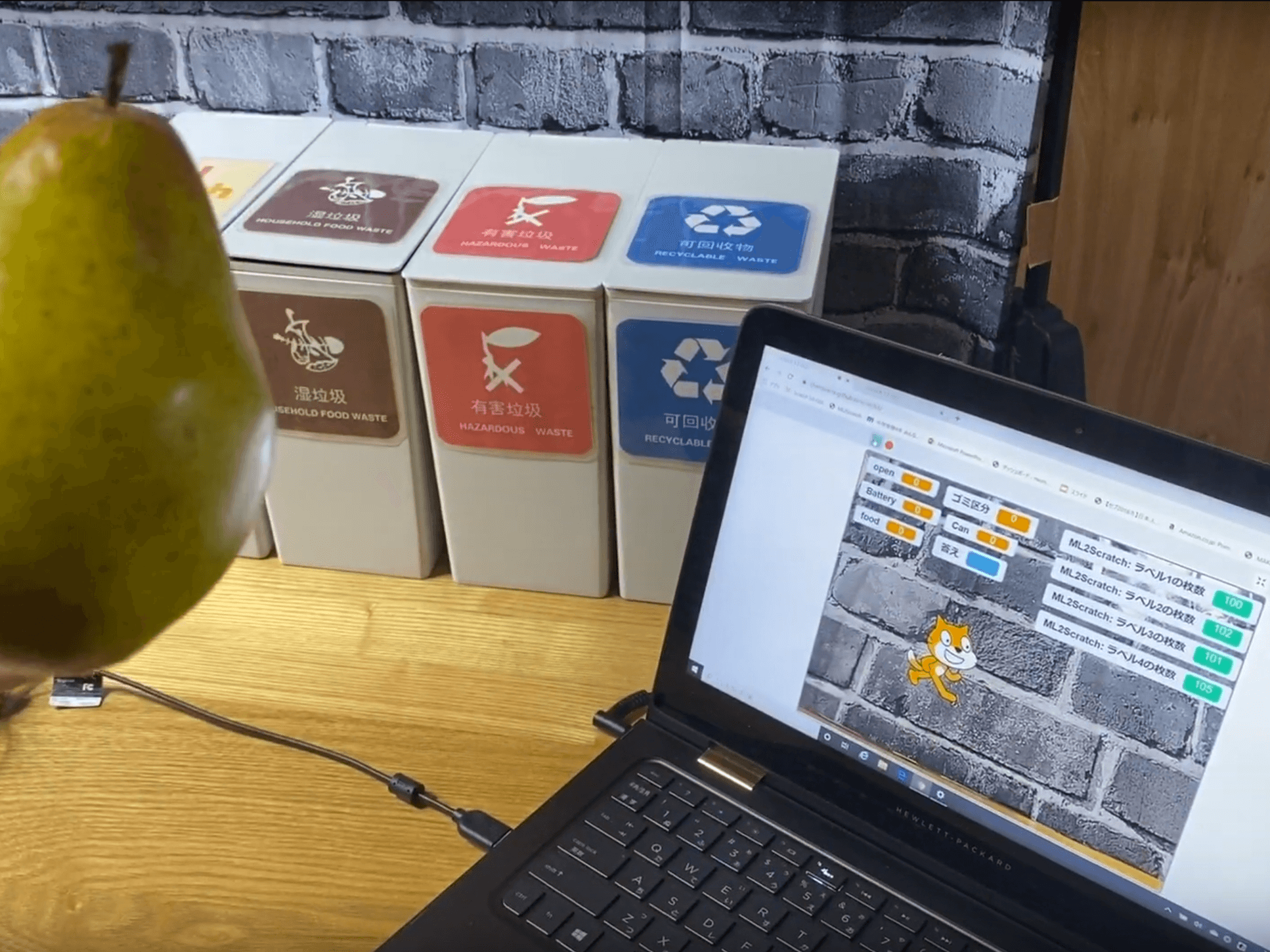
AI Trash Can
作者
小川 桃佳 (CoderDojo嘉手納)
作品の概要
私は未来に“ワンステップ”近づくために自動でゴミの種類を判断出来るゴミ箱を作りました。捨てたいゴミをカメラの前に置くと、自動的にゴミの種別を判別、ゴミの種類に合わせて、カンと電池、生ゴミなどに合わせて適切な蓋が開くしくみです。ゴミの判別にはスクラッチの拡張機能の ML2Scratch を使っています。ゴミの種類別にたくさんの写真を撮って機械学習させた結果、ゴミを判別できるようにしました。 苦労した点はゴミの判断をするところです。最初はカメラにかざしてゴミを判別しようとしていたけれど、人の洋服や背景で判別がうまく行かなかったので、カメラの前に置く方法にしました。
